Развитие на алгоритми за управление на 3D принтирана хуманоидна ръка
В изпълнение на този проект се създаде 3D принтиран модел на роботизирана хуманоидна ръка изградена на модулен принцип.

Публикувани са следните публикации по темата:
1. Naydenov B., Chavdarov, I., Georgiev I., Nikolov V., Controlling Finger Movements of a 3D Printed Humanoid Hand to Grasp Cylindrical and Spherical Objects, International Conference on Computer Systems and Technologies (CompSysTech), Ruse, Bulgaria, 2025, pp. 1-6, doi: 10.1109/CompSysTech65493.2025.11136903, https://ieeexplore.ieee.org/document/11136903
2. Chavdarov I., Naydenov B., Yochev S., An Approach for Designing 3D-Printed Assembled Rotational Joints and Assemblies for Mechanisms and Robot Models,Technologies 2025, 13 (10), 436; https://doi.org/10.3390/technologies13100436
Завършена е дисертацията на Ивайло Робертов Георгиев за присъждане на образователна и научна степен „Доктор“ в професионално направление 5.1. Машинно инженерство с научна специалност 02.01.52 - “Роботи и манипулатори” с Научен ръководител: Проф. д-р Иван Чавдаров.
Тема на дисертацията: Проектиране и управление на 3D принтирана хуманоидна ръка
Филми:
https://www.youtube.com/watch?v=22FR_4tw9M8
https://www.youtube.com/watch?v=GVjBuOV71eo
https://www.youtube.com/watch?v=6XNhMk1xJKU
GitHub: 3D-printed-humanoid-hand
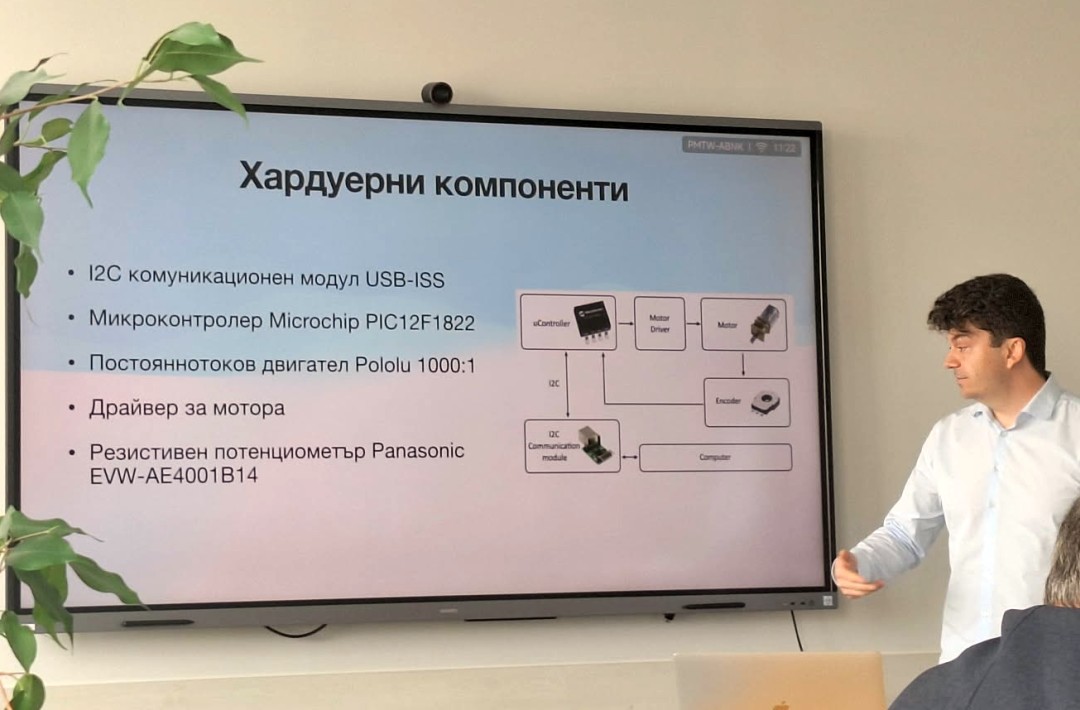
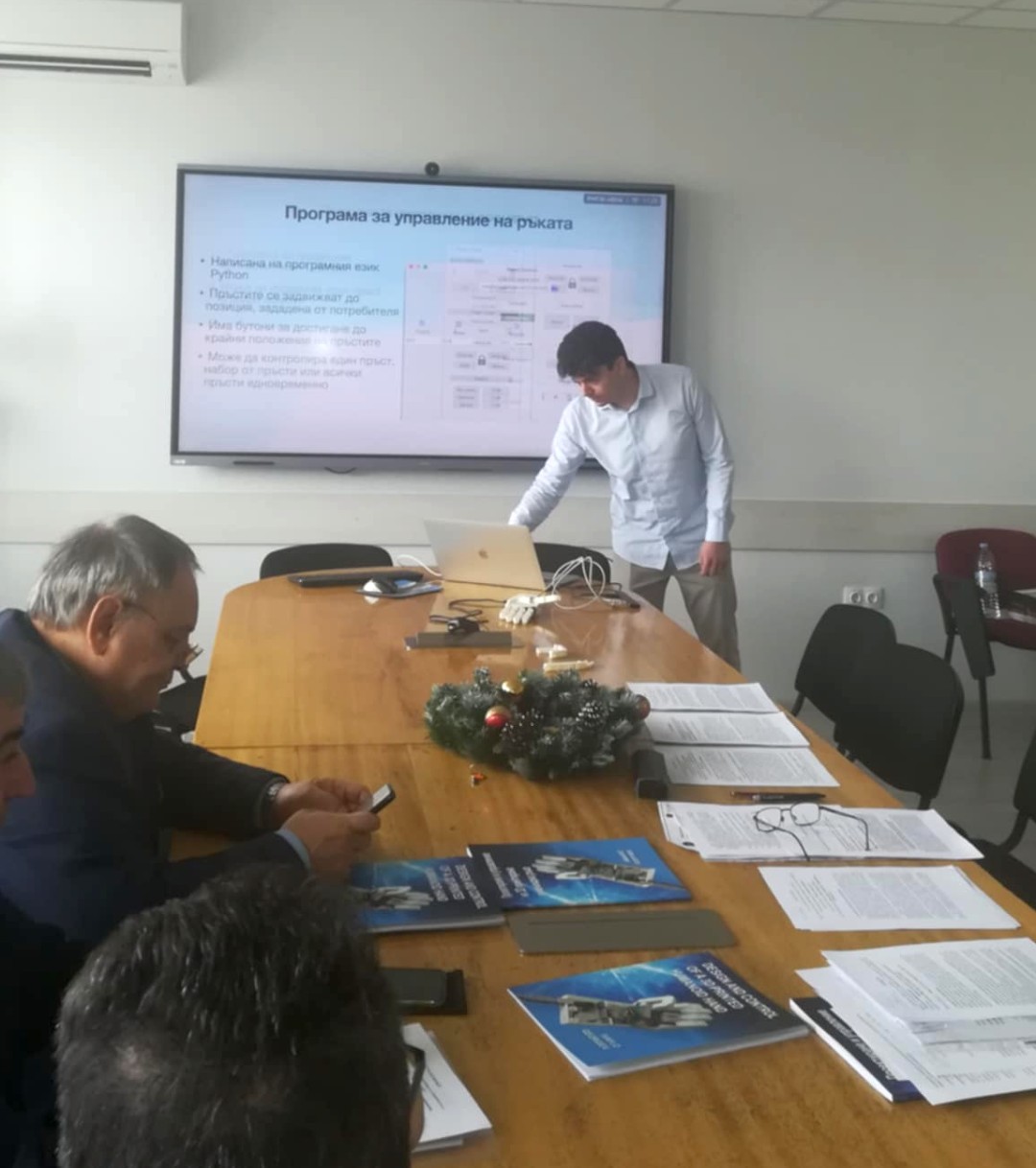
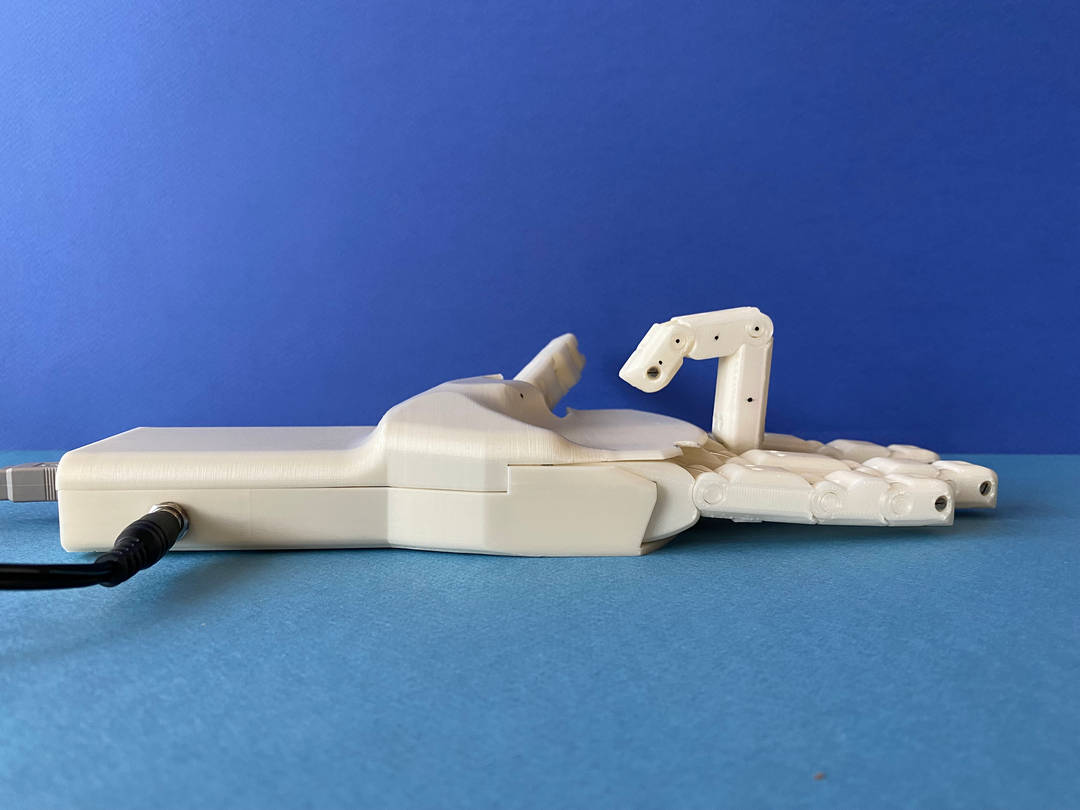
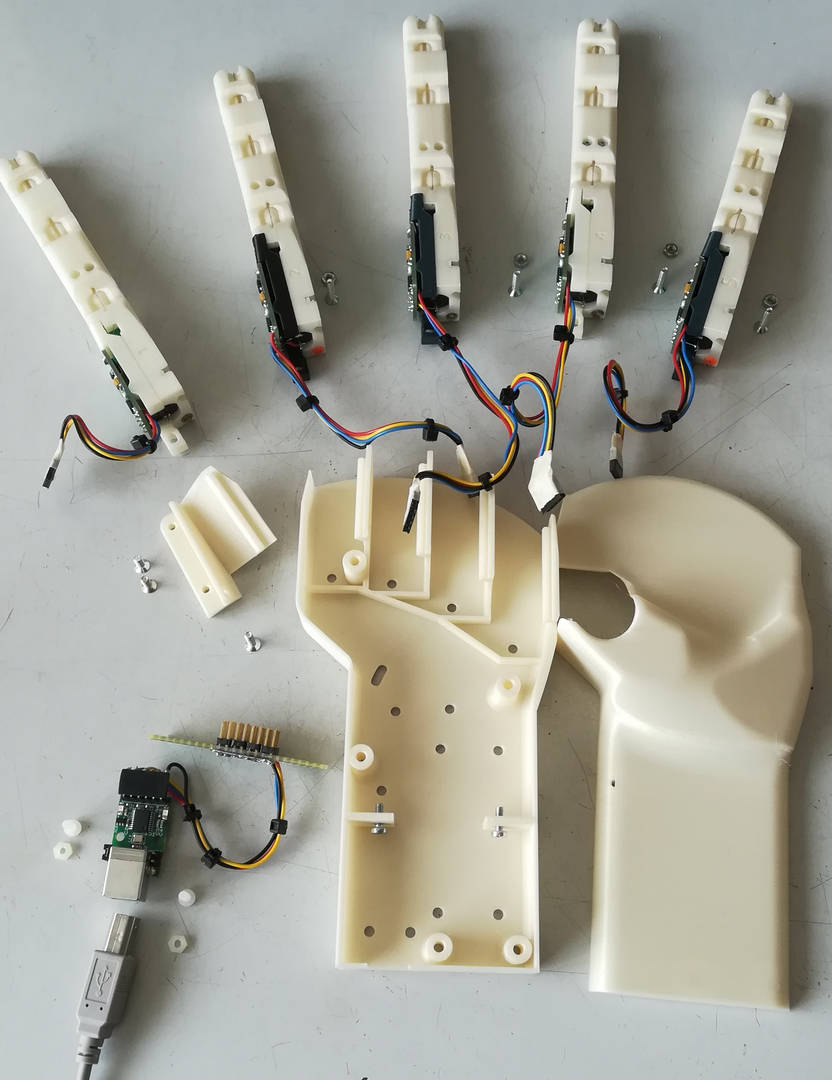
Снимки: