Изследване и моделиране на нови роботи
чрез нетрадиционни технологии и материали
1. Анализ на състоянието на изследванията по проблема
1.1. Актуалност и значимост на научната проблематика
Машините за 3D печат за първи път се появяват преди около 30 години. За съжаление дълги години те остават неизползваеми поради редица причини - досега те са били твърде неефективни, много скъпи и бавни. Днес вече е възможно те да се използват успешно. Последните 3-4 години тези технологии се развиват изключително бурно с прилагане на различни принципи на работа, ползване на различни материали и всевъзможни области на приложение. Основно предимство на тази технология е възможността за реализиране на изключително сложни форми с висока точност. Mного скоро 3D принтирането ще предизвика революция във всички сфери на науката, икономиката и развлечението. 3D принтирането може да разчупи бариери в проектирането на роботи – дава възможност за реализиране на елементи със сложни вътрешни кухини, които не могат да се реализират по друг начин, позволява създаването на съвършено нов тип кинематични връзки и др.
Мобилните роботи не винаги могат да бъдат програмирани да изпълняват зададени действия, тъй като не се знае предварително какво ще е разпределението на околните обекти, така че роботът може да се сблъска. За преодоляване на тези проблеми се ползват специализирани алгоритми за управление, ползва се мултисензорана система за събиране на информация за заобикалящата среда. Роботите за инспекция инспектират трудно достижими зони, като малки пукнатини, развалини от срутени сгради и тръби. Роботи се използват в подобни зони, за да се изследват недостижими области, като видео образ се доставя в реално време от зони, които са недостижими и вредни за спасителните екипи от хора. Като пример може да се посочи змиеобразният робот, предназначен за спасителни операции в населени райони, разработен в Университета Карнеги Мелон - САЩ. В Япония е създаден Интернационален Институт за Спасителни Системи със задача изследване и разработване на ключови технологии за реализация на роботи за търсене и спасяване на хора, в очакване на бъдещи големи земетресения и други катастрофални събития. Разработването на мобилни крачещи роботи, аналози на животни е от полза, както за инженерите, така и за биолозите. От живата природа може да се черпят идеи, които са доста по-практични, тъй като еволюцията на планетата е развивала животните в продължение на стотици милиони години, а човека има познания на механиката едва от няколко хиляди години. Гущерите са един от обектите на сериозни биомехничните изследвания, а също и за разработване на роботи техни аналози.
Обобщавайки състоянието на изследванията по темата на проекта, могат да се направят следните изводи:
Провеждат се системни изследвания в областта на роботи, осигуряващи висока мобилност за извършване на действия в неструктурирана среда, но не са намерени общи и универсални решения; Липсват системни изследвания в областите на синтеза и анализа на структури, които осигуряват пълноценно движение и преодоляване на препятствия; Не са разработени универсалн системи за управление на високо маневрени роботи. Ползването на новата технология за 3D печат за създаване на прототипи на роботи дава бързи конкретни резултати и позволява практическа оценка на предложените идеи. Актуално е прилагането на нови материали за изграждане на стъпалата на крачещи роботи с цел повишаване на устойчивостта на роботите (например материала gekskin - http://www.youtube.com/watch?v=9ZJYbcG0Ts0 ). Нови материали се ползват и в предавтелните и задвижващи механизми на роботите.
1.2. Състояние на изследванията по проблема
През последните години се забелязва засилен интерес на български учени в областта на роботиката. Пишат се редица обзорни статии, има постигнати успехи в областта на управлението и теорията на съществуващи колесни и верижни мобилни роботи. В ТУ-София се проектира и изследва шесткрак робот. Известни са и други приложения и изследвания на мобилни роботи, където се ползват главно готови (закупени от чужбина) колесни или верижни роботи, които се прилагат за военни цели или в сервизната роботика.
Голямо приложение в практиката намират стационарните роботи за решаване на специфични задачи в индустрията и за учебни цели.
В последните години технологията за 3D печат навлиза все по - масово и в България, като намира различни приложения: създават се архитектурни макети, предлагат се дизайнерски решения в различни области включително и машиностроенето. В проектирането на роботиката обаче не се срещат приложения на тази технология в България освен скромният опит на част от колектива на този проект.
Част от членовете на колектива са проектирали възли и роботи, реализирани чрез 3D принтер.
Членовете на колектива имат редица статии свързани с приложение на мобилни роботи в неструктурирана среда, крачещи роботи с променлива геометрия на тялото и др.
1.3. Насоченост на изследванията в съответствие с целите на Националната стратегия за научни изследвания и с регионалните, националните и европейските приоритети в областта на научните изследвания
Проектът е ориентиран към научни изследвания за придобиване на нови знания в областта на техническите науки, съобразен с Националната стратегия за развитие на научните изследвания в Република България 2020.
Роботиката е определена в топ 10 на приоритетните научни области на ЕС в програмата 2020 и е водеща за всички икономически развити страни (САЩ, Япония, Китай, Корея, Русия и т.н.). Разбира се в Европейската програма и в другите се има предвид интелигентни роботи, които съдържат елементи на изкуствен интелект.
В обновената Стратегия за развитието на научните изследвания в Българя за периода 2016-2019 г. мехатрониката е на първо място сред научните приоритети.
Определяне на Роботиката като приоритетно научно направление са свързани с широкия спектър на приложение (индустрия, медицина, бит и социални дейности, военни и полицейски дейности, наземни и космически изследвания и др.) и качествените промени, които правят. Променя се качеството на труда на изпълнителски, високо специализирани (инженери, лекари, учители и т.н.) и изследователски кадри. Светът налага роботите повсеместно в човешките дейности. Те ежедневно влизат в нашия живот. Като продукт на високите технологии, те са и средство на технологичния трансфер и развитие на природните, техническите хуманитарните и обществените.
2. Цели на проекта, хипотези и подходи за постигането им
2.1. Цели и хипотези
Целта на настоящият проект е разработване на иновативни, нетрадиционни роботи чрез теоретични и експериментални изследвания, които съответстват на 3D технологиите и нов тип материали. Създават се модели и прототипи на уникални роботи с използване елементи на изкуствения интелект. Освен обучението и квалифицията на млади специалисти от проекта ще се търси конкретна реализация с икономически ефект.
Хипотези:
Технологията за 3D прототипиране има следните предимства:
- позволява създаване на нов тип, директно сглобени кинематични съединения. Ще се развиват нов тип конструкции на роботи и ще се ускори тяхната реализация;
- дава възможност за реализиране на детайли със сложна форма, включително вътрешни кухини. Това позволява създаване на модели за роботи, взаимствани от природата;
- дава възможност за реализиране на детайли с променлива структура и плътност в обема си. Този факт се използва за усъвършенстване на конструкциите, балансиране и създаване на нови видове механизми;
- дава възможност за получаване на детайли от разнородни материали, следователно могат да се получат механизми с нови качества.
2.2. Подходи за постигане на изследователските цели, включително и интердисциплинарност на проектното предложение
Ще се експериментира с нетрадиционни устройства и методи за управление в роботиката. Ще се реализира система за дистанционно управление на мехатронни устройства, в частност прототипи на мобилни роботи, посредством регистрирани мозъчни биопотенциали. Предлага се развитие на научни изследвания на колектива за нови видове мобилни роботи с оригинални схеми на движение, съчетани с управляеми и неуправляеми стави, оборудвани с необходимите сензори. Членове от колектива вече имат приети шест заявки за патенти за роботи от този тип. Разработките на роботите са предназначени за индустриални и неконвенционални приложения, като движение през труднодостъпни терени, промишлени аварии, бедствени ситуации и за изпълнение на специални военни или полицейски операции. В резултат от изпълнението на проекта ще се реализират множество виртуални модели и действащи прототипи на роботи, с помощта на които ще се приложат новите конструктивни решения.
3. Методи, апаратура и изследователски техники
3.1. Изследователски методи и техники
За изпълнение на научните и приложни задачи в проекта ще се ползват различни методи. В основата на структурния синтез на манипулационните системи ще се ползва подхода предложен в. Геометричния синтез и кинематичния анализ при отворени структури ще се ползват параметрите и метода на Денавит и Хартенберг. Денавит и Хартенберг дефинират обобщена система за описание на роботи, която включва система от твърди звена свързани със стави, които са с една степен на свобода. Анализа на сингулярните конфигурации, както и кинематичния и силов анализ, ще се извършат с изследване на свойствата на съответните матрици на Якоби за съответните механизми. Резултатите ще се дискутират в аспект на физическото представяне на четирите пространства на матрицата на Якоби.
3D моделите на роботите и заобикалящата среда, необходими за виртуалното моделиране, ще се генерират на базата на подхода за параметрично описание, при които е възможно вариране на множество геометрични размери с цел оптимизация на конструкцията. Виртуалните модели ще се изследват с помощта на подходящ софтуер, като се ползват числени методи за интегриране на математично моделираните процеси. Ще се ползват двата основни метода за числено интегриране на диференциалните уравнения на движението: метод на Нютон-Ойлер и на Кута-Мерсон. Метода на Кута-Мерсон представлява интеграционна схема, която достига висока точност на резултатите достатъчно бързо, като ползва променлива стъпка. Той е подходящ за прилагане при симулации на механизми, в които се отчита контактната задача, каквито са случаите с мобилните роботи.
За търсене на най - добрите решения при вариране на различни параметри, както и при сравняване на различни конструктивни варианти, ще се ползват различни подходи и методи за оптимизация.
При създаването на функционални модели на роботите ще се ползват както известните класически технологии, така и съвременни методи за бързо моделиране, като например отпечатване на 3D принтер и др.
3.2. Предходни изследвания и компетентност на колектива в научната област
Членовете на колектива имат редица статии свързани с приложение на мобилни роботи в на структурирана среда, крачещи роботи с променлива геометрия на тялото и др.
Една оригинална разработка, създадена с технологията за 3D печат е дадена на фиг. 1.
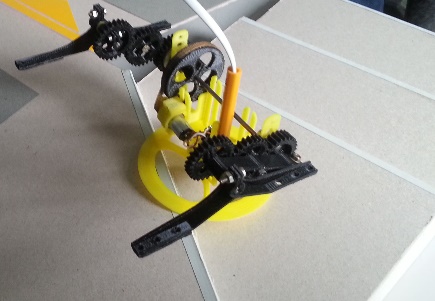
а) първоначален модел б) софтуерно управление в) оборудване със сензори
Фиг.1 Развитие на модела за крачещ робот - Big Foot
Този робот е изграден от минимален брой механични елементи. Той има само два задвижващи механизма – два управляеми двигателя и малък брой подвижни елементи. Изключително простата конструкция е предпоставка за ниска цена и висока надеждност на робота. Въпреки простата конструкция роботът притежава множество качества: - може да се придвижва чрез крачене, завива на място – около ос през центъра на тежестта му, от място може да тръгне напред или назад, преодолява препятствия, наклони и притежава известна пасивна адаптивност към тях, може да изкачва стълби, съобразени с размерите му, управлението му е просто, реализирано само чрез два двигателя. Придвижва се като запазва статична устойчивост. Подадена е и приета заявка за патент: № 111362/05.12.2012 г. с патентопритежатели: И. Чавдаров, Т. Танев, В. Павлов. След успешно внедряване на крачещия робот в центрове за деца със специални нужди e създадена нова версия, представена на фиг. 1 в). Този модел е снабден със сензори за цвят и разстояние, които ще се използват при разработване на сценарии за образователни игри.
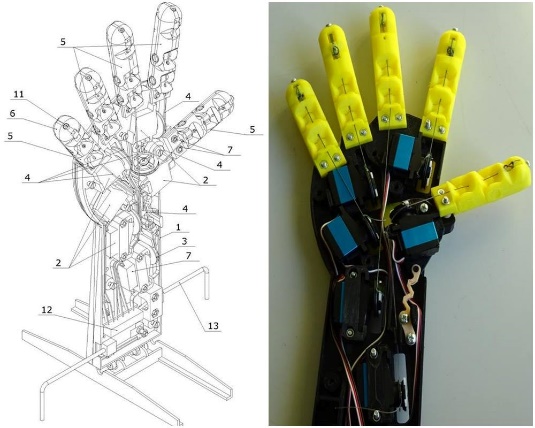
Реализиран е действащ прототип на протеза за ръка, като е ползвана технология за бързо прототипиране (фиг.2).
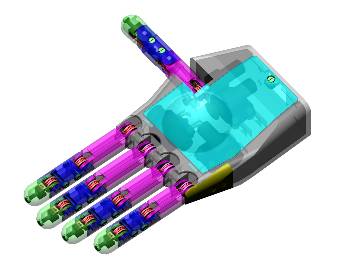

Фиг.2 Кинематична схема, 3D модел и прототип създаден с 3D принтер на протеза за ръка. (Заявка за патент: N 111362 от 05.12.2014 г. с патентопритежатели: В. Павлов И. Чавдаров, В. Николов, Г. Чипов,)
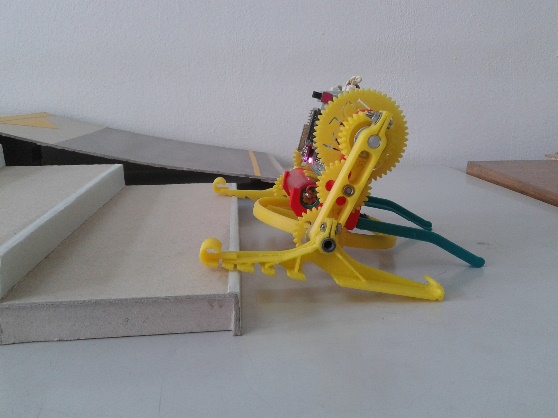
На фиг. 3. е представена хуманоидна ръка за жестове, която също е реализирана с тази технология.
Фиг.3 Хуманоидна ръка за жестове
Друго направление е робот за инспекция на тръби (фиг. 4). Той е базиран на пирамидална структура, която е изключително устойчива - четири точков контакт към тръбата, описващ върховете на тетраедър. В тези четири точки са разположени колела а взаимното разстояние между точките може да се променя активно или пасивно с помощта на подходящо синтезирани механизми.
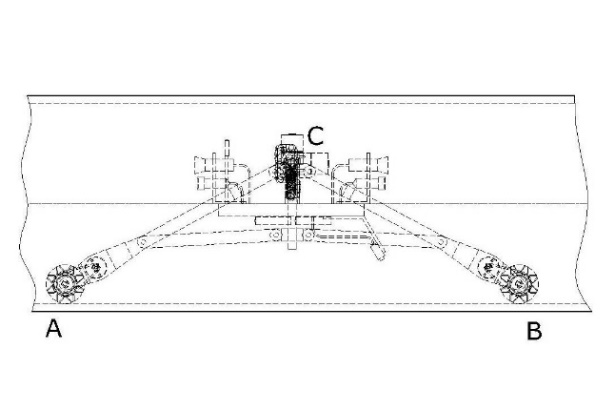
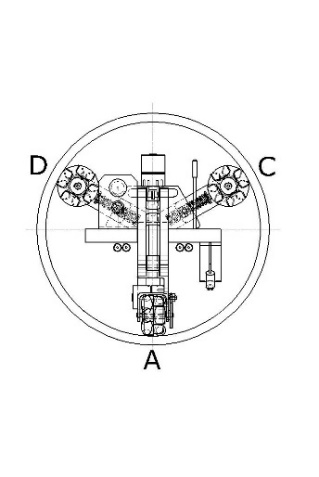

Фиг.4 3D модел на робот за инспекция на тръби.
Подадена е и приета заявка за патент: № 111774 / 11.06.2014г. с патентопритежатели:
Т. Танев, И. Чавдаров
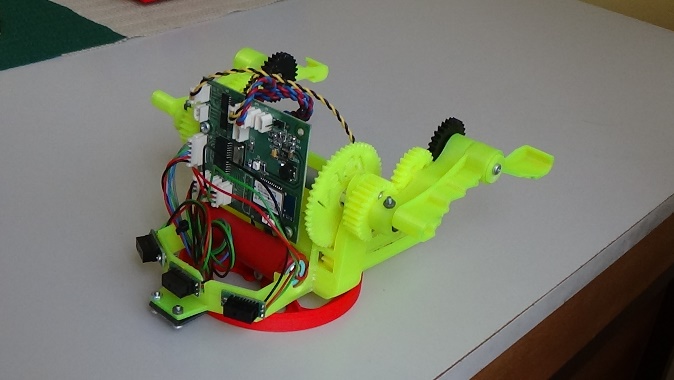
На Фиг.5 е показан, действащ прототип на робот за вътрешна инспекция за тръби, който преодолява завои и вертикални участъци, благодарение на пасивни степени на свобода и на еластичните елементи в шестте точки. Корпусът на робота е отпечатан директно сглобен.

Фиг.5 Модел на инспектиращ робот с шест точков контакт
На фигура 6 е представено устройство, което разчита мозъчни биопотенциали на човек, които могат да се използват за управление.

Фиг.6 Сензорно устройство за управление чрез мозъчни биопотенциали
Проведени са експерименти с хуманоиден робот NAO и крачещ робот Big Foot (Фиг.7), при които роботите могат да оценяват обективните параметри при изпълнение на задачите чрез две независими сензорни системи.
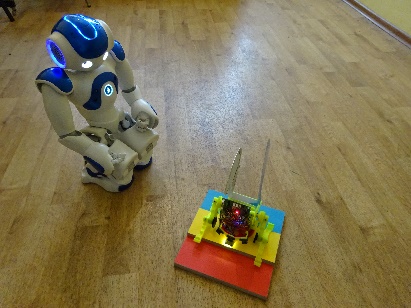
Фиг.7 Взаимодействие между хуманоиден и нехуманоиден робот
На фиг. 8 е представена конструкцията на шесткрак робот чиито прототип е създаден с 3D принтер.
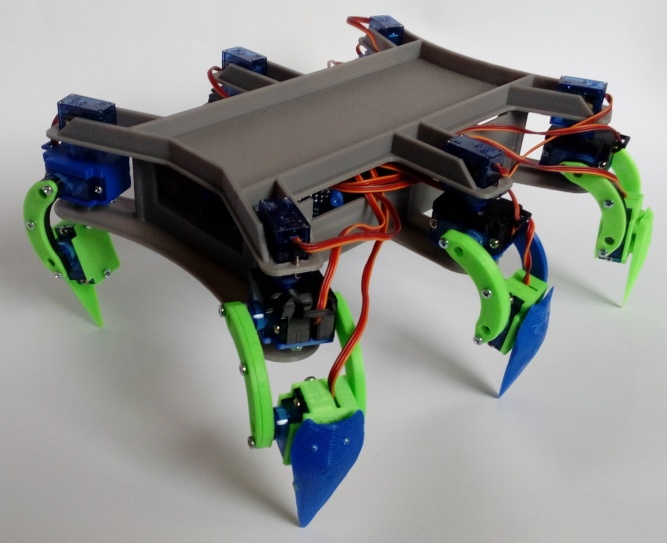
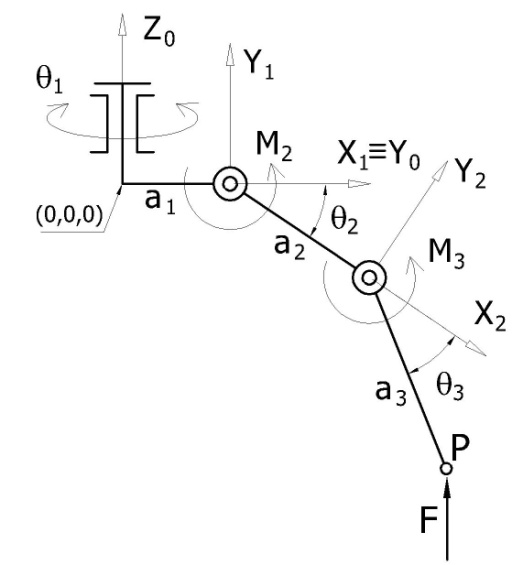
Фиг.8 а) 3D принтиран прототип на шесткрак робот; б) кинематична схема на крак
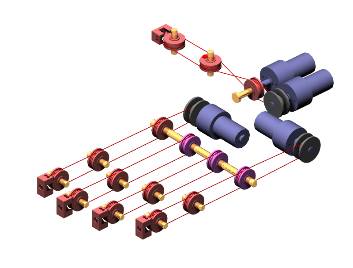
Проектирани са различни варианти на директно сглобени ротационни възли, отпечатани с 3D принтер (фиг. 9) за конструиране на роботи. Експериментално са изследвани хлабините в предложените конструктивни решения.
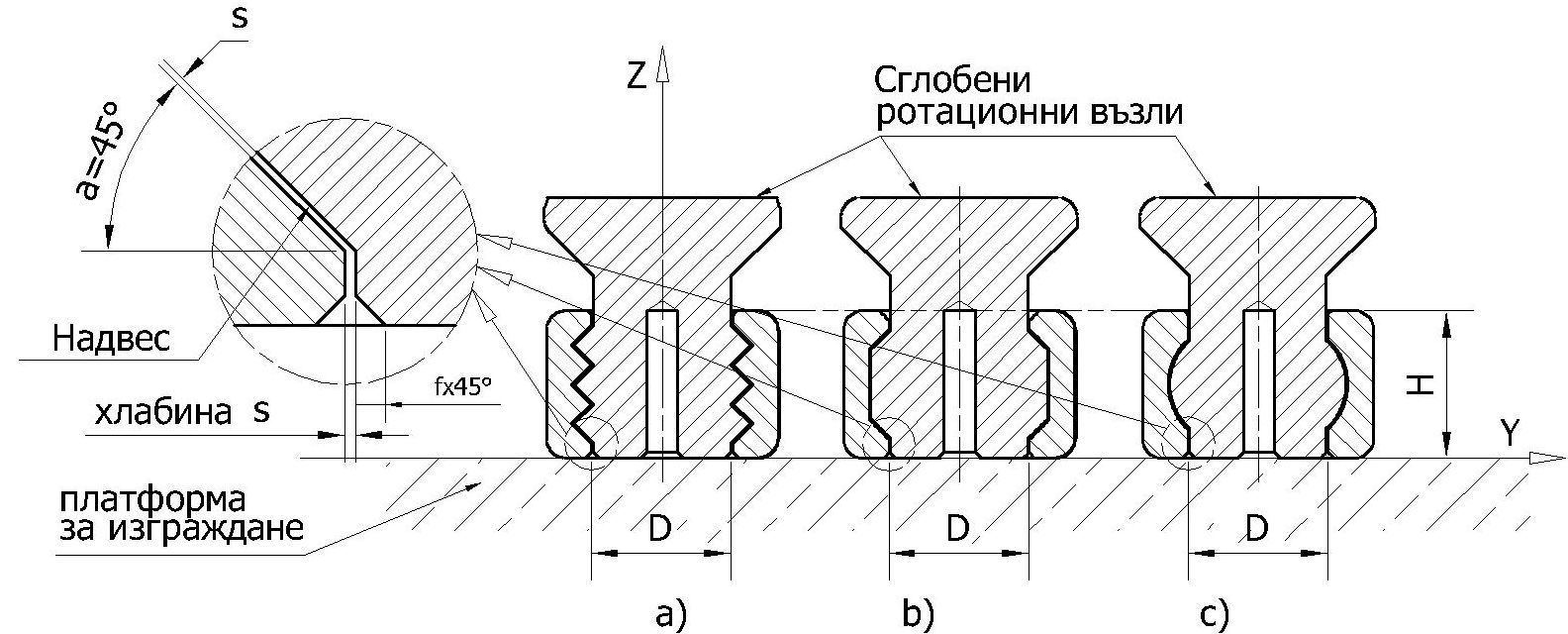
Фиг.9 Сечения на образците
3.3. Капацитет на базовата и партньорските организации за провеждане на предложените изследвания
Компютърни конфигурации, сензорни устройства – emotiv 1 бр. и Microsoft Kinect 3 бр., 3D принтери, 2 бр., крачещи роботи, 2 бр., роботи за инспектиране на тръби 2 бр., два хуманоидни робота NAO.