Research and Modelling of New Robots
by Using Innovative Technologies and Materials
1. Analysis of the current state of research on the problem area
1.1. Timeliness and relevance of scientific problems addressed by the project
3D printing machines first appeared about 30 years ago. Unfortunately, for many years they are left unused for a number of reasons - they were far too inefficient, costly and slow. Today it is possible for them to be used successfully. During the last 3-4 years, these technologies are evolving rapidly with the application of different principles, use of different materials and all sorts of applications. The main advantage of this technology is the ability to realize very complex shapes with high accuracy. Very soon 3D printing will revolutionize all fields of science, economics and entertainment. 3D printing may break the barrier in the design of robots – it allows for the realization of elements with complex internal cavities, which cannot be achieved by other means, enables the creation of an entirely new type of kinematic connections, etc.
Mobile robots cannot always be programmed to perform specified actions, as no one knows in advance what will be the distribution of surrounding objects, so the robot may collide. To overcome these problems are used specialized control algorithms and multisensor system for collecting information about the environment. Robots for inspection inspect difficult to reach areas such as small cracks, rubble from collapsed buildings and pipes. Robots are used in such areas to explore inaccessible areas and video is delivered in real time from areas that are inaccessible and hazardous for the rescue teams. As an example can be mentioned the snake-like robot designed for rescue operations in urban areas developed in Carnegie Mellon University - USA. In Japan is founded an International Rescue Systems Institute with the task of researching and developing key technologies for realization of robots for search and rescue of people in anticipation of future large earthquakes and other catastrophic events. Development of mobile walking robots, analogues of animals is useful for engineers and for biologists. From living nature can be drawn ideas that are much more practical, as the evolution of the planet has evolved animals over hundreds of millions of years, and humans have knowledge of mechanics since only a few thousand years. Lizards are one of the objects of serious biomechanical studies and also for the development of their robotic analogs.
Summarizing the studies on the topic of the project can be drawn the following conclusions:
Systematic research is carried out for robots that provide high mobility to perform actions in unstructured environments, but general and universal solutions are not found; there are no systematic studies in the areas of synthesis and analysis of structures that provide full movement and overcoming obstacles; Universal systems for managing highly maneuverable robots are not developed. Using the new technology for 3D printing, prototyping robots delivers quick concrete results and allows a practical assessment of the proposed ideas. Interesting is the application of new materials for building the steps of walking robots in order to improve the stability of robots (e.g. material gekskin - http://www.youtube.com/watch?v=9ZJYbcG0Ts0). New materials are used in the transmissions and actuators of robots.
1.2. Current state of the research on the problem area
In recent years Bulgarian scientists have shown increased interest in the field of mobile robots. Many review articles have been written, success has been achieved in the field of control theory and existing wheeled and tracked mobile robots. In TU-Sofia a six-legged robot is being designed and analyzed. There are other applications and studies on mobile robots, where are used mainly ready-made (bought from abroad) wheeled or tracked robots, which are applied for military purposes or in the field of service robotics.
In recent years, the technology of 3D printing is becoming more and more widely spread in Bulgaria, finding various applications: to create architectural models, design solutions are offered in various fields including mechanical engineering. In designing robots we have not met the application of this technology in Bulgaria except the modest experience of the team of this project.
Some of the team members of this project have partial experience in designing units for robots using a 3D printer. A working prototype of arm prosthesis is created using this technology.
Another original design created with 3D printing technology is given in Figure 2. Team members have a number of articles related to the application of mobile robots in unstructured environments, walking robots with variable geometry of the body and others.
1.3. Focus of proposed research in line with the objectives of the National Research Strategy and with regional, national and European research priorities
The project is mainly orientated towards priority research area of the Competition for funding of research: Technical sciences and national strategy for development of scientific researches in Bulgaria.
As it was noted above Robotics is one of the top 10 priority research areas of EU program 2020 as well as is a leading are for all economically developed countries (US, Japan, China, Korea, Russia, etc.). Of course the European and other programs mind intelligent robots that contain elements of artificial intelligence.
In the renewed Strategy for the development of scientific research in Bulgaria for the period 2016-2019, the Mechatronics is the first among the scientific priorities.
Determination of Robotics as a priority scientific field is connected with wide range of its applications (industry, medicine, life and social activities, military and police activities, earth and space investigations, etc.) and the qualitative changes they make. Change the quality of work of the executive, highly specialized (engineers, doctors, teachers, etc.) and research staff. Now the world enforces robots everywhere in human activities. They daily come into our lives. As a product of high technology, they are also a means of technology transfer and development of natural, technical, humanities and social sciences (the development of rules and conditions for the coexistence of humans and intelligent robots should be developed). Robots are powerful mean of inspiring and educational activities at young until old ages as well as intelligent research.
2. Project objectives, hypotheses and approaches for accomplishment of project objectives
2.1. Project objectives and hypotheses
The purpose of this project is to develop new, non-traditional robots through theoretical and experimental studies with the new 3D technology, new materials and element base. The project envisages the creation, study and analysis of structures of robots. Will be performed synthesis, mathematical modeling, simulation, design, development of appropriate techniques and modeling of new, highly maneuverable and flexible handling systems, movement systems and end effectors, by using new types of materials and 3D printing technology. It will be aimed high qualification and education of the participants and also a realization with economical effect.
Hypotheses:
The 3D printing technology has these advantages:
- allows realization of a new type of a directly assembled kinematic joints; a new type of robots will be developed and their realization will be accelerated;
- presents the opportunity for creating details with complex shape including internal cavities. This allows model design of models, inspired by the nature;
- presents the opportunity for creating details with variable structure and density in its volume. This fact is used for optimization of the design and realization of new types of mechanisms;
- presents the opportunity for creating details from different types of materials; therefore mechanisms with new qualities/properties could be made.
2.2. Approaches for accomplishment of the research goals including interdisciplinarity of the project
It will be experimented with unusual devices and methods for control in robotics. A system for remote control of mechatronic devices will be realized, more accurately, prototypes of mobile robots by using brain bio-potentials. Scientific researches of the team members are offered for original kinematic schemes of locomotion control of joints which are equipped with new types of sensors. The team members already have six requests for patents accepted. The research of the robots are intended for industrial and unconventional applications as movement across unstructured environment, industrial accidents, disastrous situations and also for realization of special military and police operations. As a result of the realization of the project, variable virtual models and prototypes of robots will be created by which the constructional realizations will be applied.
3. Methods, research equipment and techniques
3.1. Research methodology and techniques
For the implementation of scientific and applied problems in the project will be use different methods. For the basis of the structural synthesis of manipulation systems will be used the approach proposed. For the geometric synthesis and kinematic analysis of open structures will be used the parameters and method of Denavit and Hartenberg. Denavit and Hartenberg define generalized system for describing robots, which includes a system of rigid bodies connected by joints that have one degree of freedom. Analysis of singular configurations, as well as kinematic and force analysis will be performed by studying the properties of the corresponding Jacobian matrices for the mechanisms. The results will be discussed in the aspect of the physical representation of the four spaces of the Jacobian matrix.
The 3D models of robots and the environment needed for the virtual modeling, will be generated based on the approach of parametric description, in which is possible the variation of a number of geometric dimensions in order to optimize the design. Virtual models will be tested using the appropriate software by using numerical methods for the integration of mathematically modeled processes. The two basic methods for numerical integration of differential equations of motion will be used: method of Newton-Euler and Kutta - Merson. The Kutta Merson method is an integration scheme that achieves a high accuracy of the results fast enough by using variable step. It is suitable for use in simulations of mechanisms which account for the contact task, as in the case of mobile robots.
For searching the best solutions for varying different parameters and comparing various design options, different approaches and methods for optimization will be used.
While creating functional models of robots, famous classical technology will be used as well as modern methods for quickly modeling, such as printing a 3D printer, etc.
3.2. Previous accomplishments and competencies of the research team in the research area of the project
Team members have a number of articles related to the application of mobile robots in unstructured environments, walking robots with variable geometry of the body and others.
An original development realized by the 3D printing technology is shown in Figure 1.
a) Initial Model b) Software Control c) Sensor Equipment
Fig.1 Development of the walking robot model - Big Foot
This is an idea for a walking robot composed of a minimum number of mechanical elements. It has only two actuators - two controlled engines and a small number of moving parts. Extremely has simple construction is a prerequisite for low cost and high reliability of the robot. Although the robot has simple construction it has many features: it can move via walking, turn in place - around axis through center of gravity of the robot, from place it can move forward or backward, overcome obstacles and slopes, it can climb stairs compatible with the robot's size, it has some passive adaptation to obstacles, its management is simple as it manages only two engines. The robot moves while it's retaining static stability. Inquiry is filed and accepted for patent: № 111362/05.12.2012, with patent holders: I. Chavdarov T. Tanev, V. Pavlov. It had been created smaller working prototype of the robot by using the technology of 3D printing. After the successful Implementation of the walking robot in centres for children with special needs, a new version was created presented in Figure 1 c). This model is equipped with optical and RGB sensors. This new robot will be used for making educational games.
A prototype of a hand prosthesis was created by the rapid prototyping technology - Figure 2.
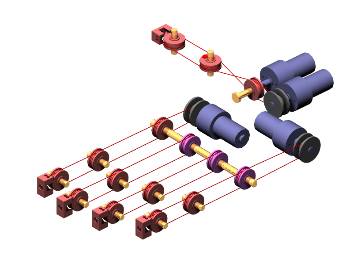
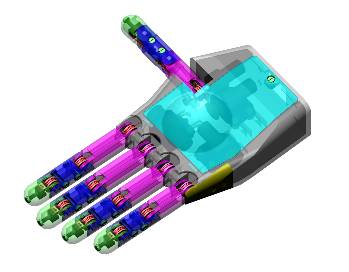
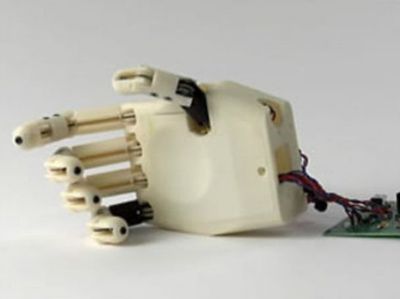
Fig.2 Kinematic scheme, a 3D model and a prototype of a hand prosthesis made by a 3D printer. (Patent: № 111362 from 05.12.2014. with patentees: V. Pavlov, I. Chavdarov, V. Nikolov, G. Chipov)
In Figure 3 a humanoid hand used for gestures also realized by 3D printing technology is shown.
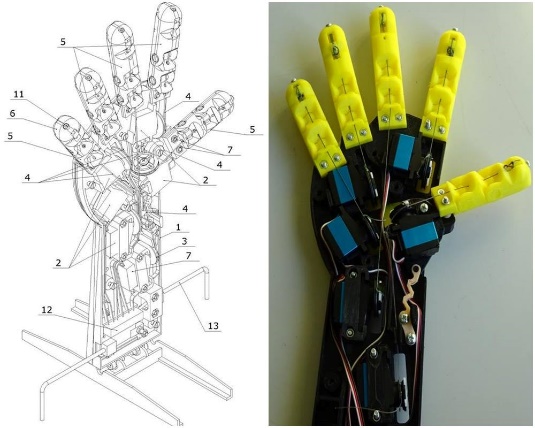
Fig.3 a humanoid hand used for gestures
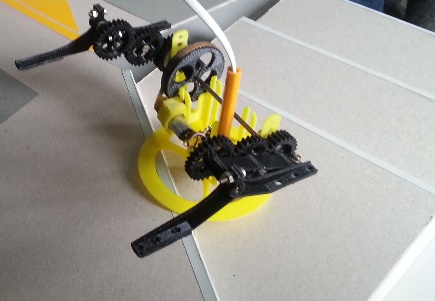
Another direction is a robot for inspection of pipes (Figure 4). It is based on a pyramid structure that is highly resistant. Not by chance one of the seven wonders of the world which has survived to this day is exactly the Great Pyramid. The structure of our proposed robot is based precisely on this idea, four points are vertices of the tetrahedron performing continuous contact with the pipe. These four points are located on the wheels and mutual distance between the points may be actively or passively changed by means of appropriate mechanisms synthesized.
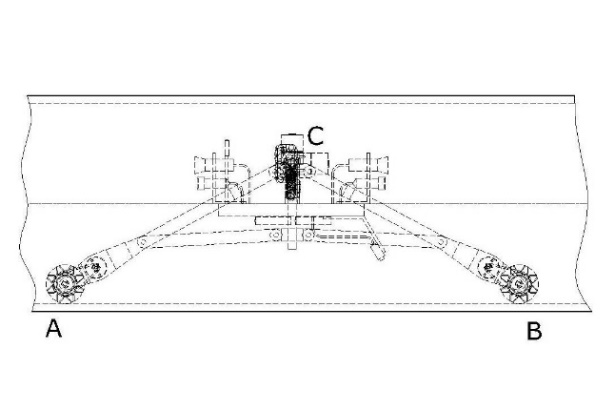
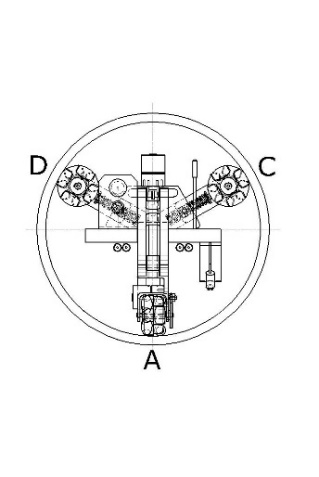

Fig.4 3D model of the robot for inspection of pipes
Inquiry is filed and accepted for patent: № 111774 / 11.06.2014g. with patent holders: T. Tanev, I. Chavdarov.
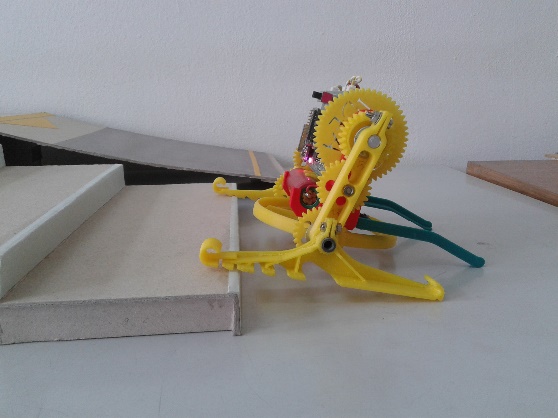
In Figure 5 a prototype of a model for In-pipe inspection is presented. The robot can overcome curves and vertical areas because of its passive degrees of freedom and elastic elements in six zones. The basis of the robot is printed directly assembled.

Fig.5 A model of an In-pipe inspection robot is presented. The robot with six point contact
In Figure 6 a device for brain bio-potentials registration used for control is shown.

Fig.6 Sensor device for brain bio-potential control
Experiments with humanoid robot “NAO” and walking robot “Big Foot” were made. The robots could appreciate objective parameters of the tasks by two independently working sensor systems – Figure 7.
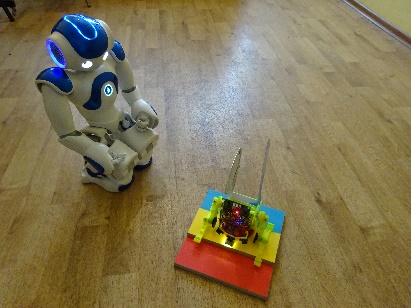
Fig.7 Relationship between humanoid and non-humanoid robots
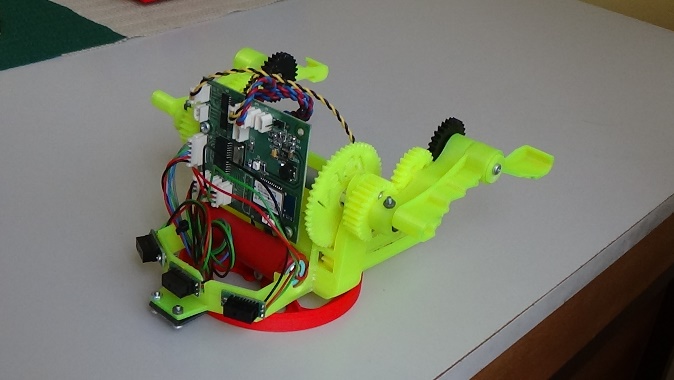
A design of a six-leg robot which prototype is created by a 3D printer is shown in Figure 8.
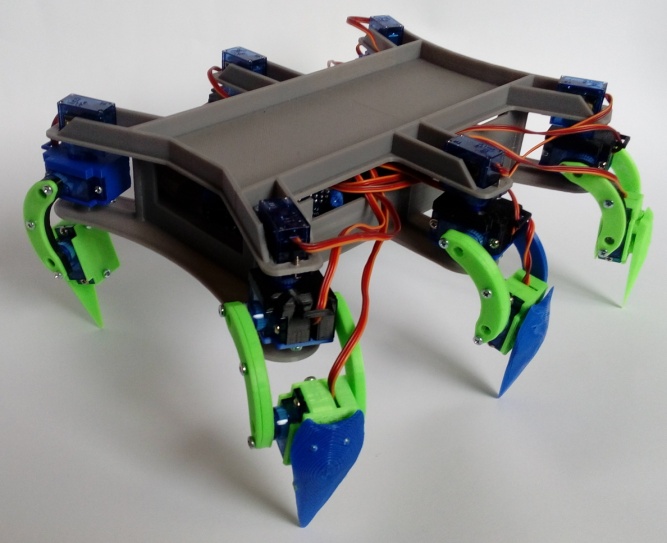
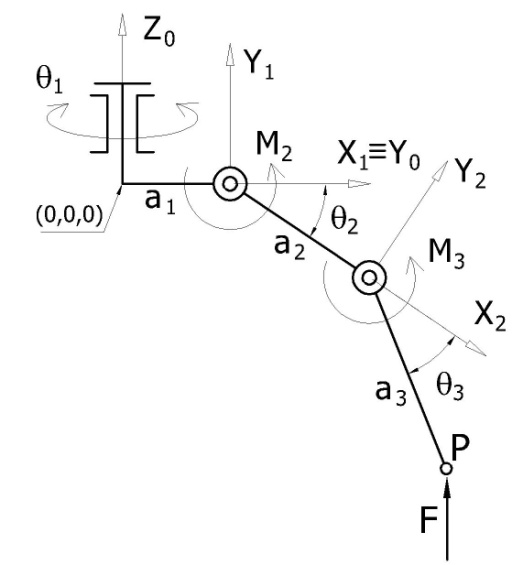
Fig. 8 a) 3D printed prototype of a six-leg robot; b) kinematic scheme of a leg
Different variations of directly assembled rotational joints made by a 3D printer and used for robot construction are designed (Figure 9). The clearances of the cross-sections of the samples are experimentally defined./p>
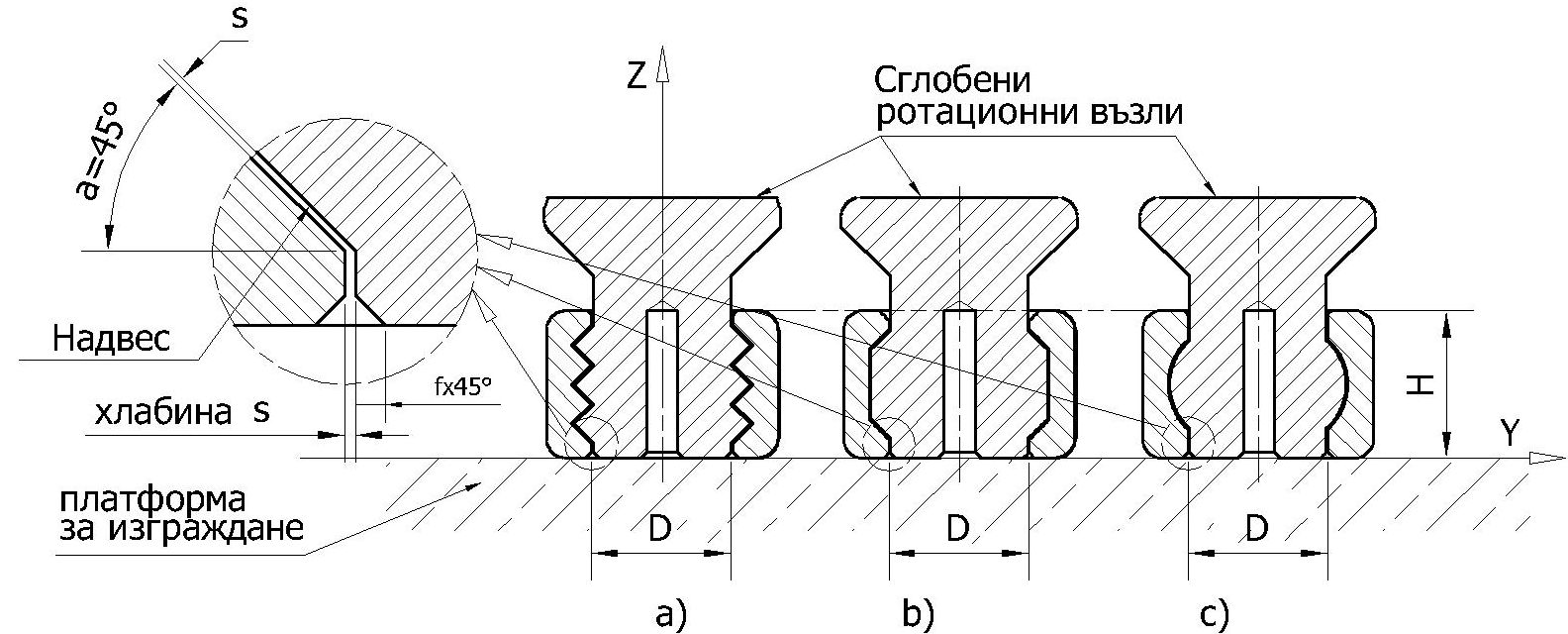
Fig. 9 Cross section of the Samples
3.3. Capacity of the applying and partner organizations to conduct the proposed research
Computer configurations, sensor devices – Emotive, Microsoft Kinect, 3D printers, walking robots, pipe inspection robots and humanoid robots “NAO”.