Изследване и моделиране на нови роботи
чрез нетрадиционни технологии и материали
4. 3D принтиран учебен стационарен робот
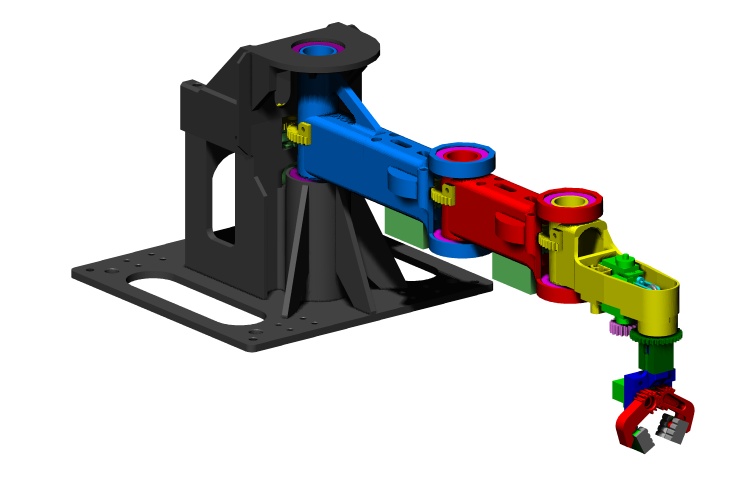
Проектиран е модел на равнинен редундантен робот. Модела се задвижва от 6 независимо управляеми сервомотора. Има 4 успоредни ротации, една транслация и хващач. Създаден е 3D CAD модел на робота. Симулация на виртуален модел може да се види тук.
Създаден е 3D принтиран прототип на робота.
Управляващата система на робота е базирана на платформата: Raspberry Pi. Проектиран е хардуера и основния софтуер на робота. Управлението се осъществява посредством безжична комуникация (WiFi) с компютър. Проектирането и реализацията на механичната система основно се осъществява от доц. Иван Чавдаров. Управляващата система до момента е реализирана от д-р Валентин Николов (Външен член на колектива на проекта).
Филм към първия вариант на прототипа.
Предназначение на разработвания прототип.
Такива роботи намират приложение при работа в неструктурирана среда с наличие на препятствия в работната зона. Могат да се прилагат различни алгоритми за специализирано управление като се оптимизира изпълнение на различни траектории по различни критерии (минимален разход на енергия, максимална сила и др.). Ще се изследват възможностите за изпълнение на различни алгоритми от робота.
Робота ще намери приложение при обучението на студенти от СУ „Климент Охридски”-София и ТУ-София.