Research and Modelling of New Robots
by Using Innovative Technologies and Materials
4. 3D Printed Study Stationary Robot
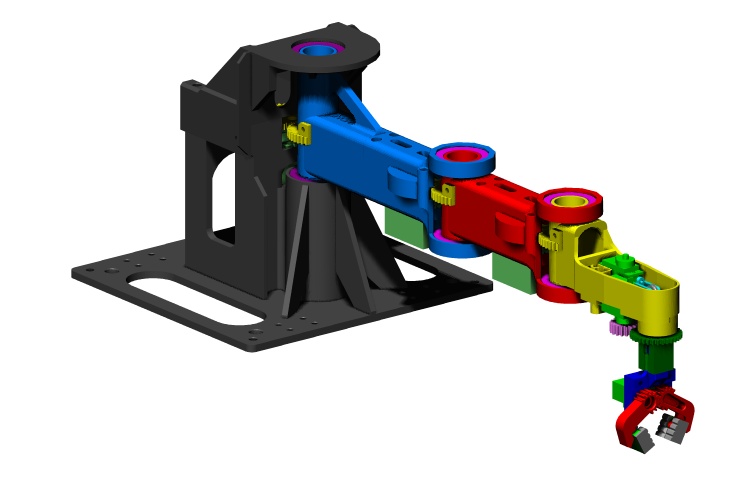
A model of a planar redundant robot has been designed. The model is powered by 6 independently controlled servomotors. The robot possesses 4 parallel rotations, one translation and a gripper. A 3D CAD model of the robot was created. Simulation of the virtual model can be seen here..
A 3D printed prototype of the robot was created.
The control system of this robot is based on the platform: Raspberry Pi. The robot's hardware and software has been designed. Control is managed via wireless communication (WiFi) using a computer. The design and implementation of the mechanical systems is mainly carried out by Assoc. Prof. Ivan Chavdarov. The control system has been implemented by Dr. Valentin Nikolov (External member of the project team).
A video demonstration of the first version of the prototype.
Purpose for developmend of the robot.
Such robots find application in unstructured environments, for example enviroments with the presence of obstacles in the work area. Multitude of different algorithms for specialized movement can be inputted, each one prioritizing different criteria (minimum energy consumption, maximum power, etc.). We will explore the possibilities of implementing different algorithms by the robot in the future.
The prototype will find application in the training of students from Sofia University "St. Kliment Ohridski" - Sofia and TU-Sofia.